
CL Discrete Second Order Low Pass Filter
| Owning Palette: | Discrete |
| Requirements: | Quanser Rapid Control Prototyping Toolkit, LabVIEW 2022 or newer, Control Design and Simulation Module |
Description
Models, in the discrete-time domain, a second-order low-pass filter characterized by a cut-off frequency and a damping ratio.
Recommended Inputs or Dialog Box Options  Recommended inputs need not to be wired. They may be selected to appear as terminals or dialog parameters, but show up as terminals by default.
They appear in simple text in the context help window for the VI.
Recommended inputs need not to be wired. They may be selected to appear as terminals or dialog parameters, but show up as terminals by default.
They appear in simple text in the context help window for the VI.

|
x is the input signal to the second-order low-pass filter. |
|
|
cut-off frequency is the cut-off frequency (in radians per second, i.e., rad/s) of the second-order low-pass filter. |
|
|
damping ratio is the damping ratio of the second-order low-pass filter. |
|
|
x0 is the input signal initial condition to the second-order low-pass filter. |
|
|
sample time (in seconds, i.e., s) of the VI. |
Outputs

|
y is the (filtered) output signal from the second-order low-pass filter. |
|
|
yd is the time-derivative of the output signal from the second-order low-pass filter. |
Details
The CL Discrete Second Order Low Pass Filter VI models, in the discrete-time domain, a second-order low-pass filter characterized by a cut-off frequency and a damping ratio. The filtered output is always continuous even after any parameter change (e.g., cut-off frequency and/or damping ratio).
The block diagram for this VI is shown below:
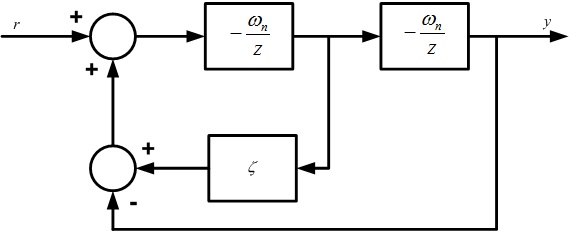
where ωn is the cut-off frequency and ζ is the damping ratio.
Feedthrough Behaviour
All input/output pairs of this function have direct feedthrough behaviour.
Examples
| RCP CL Discrete Second Order Low Pass Filter Example |
See Also
| CL Second Order Low Pass Filter | Models, in the continuous-time domain, a second-order low-pass filter characterized by a cut-off frequency and a damping ratio. |
Targets
|
Target |
Supported |
Comments |
|---|---|---|
|
Yes |
Fully supported. |
Copyright © Quanser Inc. This page was generated 2024-11-15. Submit feedback to Quanser about this page.
Link to this page.